
为了配合靶场实弹射击训练的需要,国内外已经开发了几种遥控靶车。近年来,为适应部队现代化训练要求,已有一些靶场装备了由卷扬机拖动靶架在轨道上往复运行装置或轨道式运动靶车,但这类靶车以直流或交流电为动力源,需轨道和动力线,配套设施多,维护保养复杂,在多尘的现场由于接触不良而造成失控、速度调节精度差,且需操作人员在目标区靶房操纵,不安全因素突出。本设计采用驱动控制的自带动力靶车结构相对比较简单,方便易用。靶车速度可调、设置简便、自带动力、无需轨道,不依赖场地设施,不需要保障人员在目标区操控,从而解决了长期困扰部队实弹射击训练时的人员安全问题。从经济效益分析,不需要修建隐蔽部,也不需要架设动力线 电力拖动方案
具有良好的起动性能,且能在宽广的范围内平滑而经济的调速、起动、制动和正反转等,因此被大范围的应用于起动和调速要求比较高的生产机械上。直流传动系统—直在变速传动领域占统治地位。在进行自带动力靶车设计中,根据“既要优化,又要继承”的原则,沿用了这套成熟的方案,采用进口高性能汽油发电机为车体内电动机及电气控制管理系统提供
电源,电压220VAC;采用直流电动机为靶车提供动力;采用接触器换向,直流调速器调节直流电机速度的方式实现了电力拖动问题。本设计对靶车的重量有严格的要求(500kg~600kg),电动机的功率过大必定会增加车体的总重量,使得控制车体的快速起动、制动、正反转以及变速增加了障碍;功率过小,则不能拖动系统正常运行,因而选用电动机的功率为5.5kVA。
本设计中,系统经常要正、反转运行,为了尽量缩短起动和制动过程的时间,在电机最大电流(转矩)受限的条件下,希望充分的利用电机的允许过载能力,最好在过渡过程中从始至终保持电流(转矩)为最大允许值,使靶车尽可能用最大的加速度起动;到达稳定转速后,又让电流立即降下来,使转矩马上与负载平衡,从而转入稳态运行。直流调速系统仍采用双闭环结构,电流环(内环)仍采用传统的PI调节器以提高系统响应时快速性和限流的必要性,电压环(外环)以提高其鲁棒性,二者之间实行串级连接。这样就构成了电压、电流双闭环调速系统,分别调节转速和电流。
本设计使用了可控硅直流调速器,它是由可控整流桥构成主回路,由集成电路及触发专用电路等组成给定积分、速度调节、故障保护及触发脉冲电路,组装在同一单元内的直流电动机调速装置。可控硅信号触发单元采用进口的芯片,包括型号为TCA785的锯齿波集成移相触发器、ULN2004七重达林顿反相驱动器、或逻辑门和KCB472/104B的可控硅触发变压器芯片。其中TCA785为第三代晶闸管单片移相触发器,对过零点识别更可靠、输出脉冲整齐度更好,移相范围更宽,其输出脉冲宽度可手动调节。另外,可控硅触发变压器接在可控硅设备控制触发单元与可控硅控制极之间,一方面传递触发脉冲,另一方面对强弱电之间起到了可靠的隔离作用,对设备起到了保护的作用。直流调速器的上板是控制、调节单元。包含了给定积分电路、速度调节器、电流调节器、电流断续补偿、逻辑电路、故障综合及保护电路,以及用于张力控制的限幅调节电路。直流调速器的下板是
及触发单元。由控制电源变压器及三端集成稳压器组成控制电源,它们提供了控制管理系统所需的+24V整流电源,以及±15V,压电源,变压器同时提供了同步信号;由集成电路及脉冲变压器组成移相脉冲行程及输出电路。
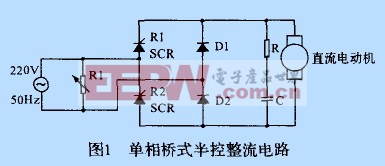
可控硅调速器主要使用了原装进口的SKKT57/16E集成可控硅模块(参数:55A、1600V)和大功率的快速二极管集成模块,将可控硅模块和二极管模块组合成单相桥式半控整流电路,整流后的直流电源提供给直流电机工作用,这时如果调节可控硅的触发角,就可以实现电机电枢电压的调节,以此来实现直流电机的速度调节,其电路原理图如图1。
二极管模块在这里充当了逻辑门和续流二极管的双重作用,压敏电阻和阻容吸收电路能实现可控硅的过电压保护,其原理可以参考电力电子技术的相关教材,这里不再详述。
本直流调速器的控制电源与主电源同时供电,其相序相同。控制电源提供控制电路的常用电源标准,主电源提供直流电机工作电源。另外,励磁电源通过全桥整流把AC 220V电源转变成DC 22O、供给直流电机作为恒定的励磁电源,其相序和控制电源以及主电源的相序一致。当确认供电电源以及外部接线、内部短接线正确无误后.就可以开机并调试了。
(2)切断控制电源及主电源,恢复电机电枢回路接线,接通励磁电源、主电源,缓慢调节给定电位器,电机开始旋转。注意此处的电位器就是速度的控制信号给定,手动操作只需要调节这个10K的电阻就能轻松实现电机速度变化。自动时,能不用这个电位器,利用单片机的DA转换功能直接给出0V-10V的速度控制电压信号就可以了,这个就是单片机调速的接口。
反馈极性相反,交换反馈信号两线接头;若电机的旋转方向相反,交换电机电枢的两接线及反馈信号两线)调整给定电压,使电机转速缓慢上升到额定值。此时的给定电压应为10V,否则调整电位器,使系统满足;当给定10V时,转速达到额定值。4 电动机的功率计算
靶车带动靶运动要抵抗外力,包括风力、车体重、摩擦力等,还要有加速度,考虑这一些因素,根据项目提出的速度要求,首先计算出拖动力,然后计算出电动机的功率和电流,再根据电动机的功率和电流选择发电机的型号。按给定,靶车重量为500kg,靶车速度要求是7km/h-25.5km/h或1.94m/s-6.94m/s,靶车行进的摩擦系数取0.1,靶车行进的最大加速度为2m/s ,通过这一些已知条件可以计算出最大推动力,式(1)是最大推动力的计算式,进而计算出上限功率,式(2)列出了上限功率的计算式。
最大功率是额定功率的1.5倍,所以理想的额定功率为6.23kW。而由于发电机过载能力较小,实际选定的额定功率是5.5kW。此时的最大负载时电机过载系数稍大,但能够完全满足要求。
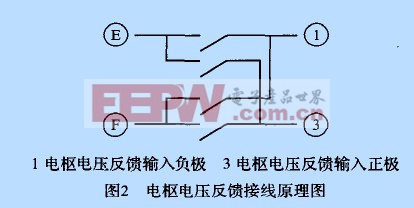
如果为了宽范围、高精度的电机转速调节,那么采用直流测速电机反馈无疑是一个好的方案,但如果对调速范围和转速精度要求不是很严格的情况下,采用电枢电压反馈将是一个简单、方便的措施。在本设计中,为了省却测速电机,并节约系统空间和减轻重量,采用了简单易用的电枢电压反馈。考虑到正、反转的要求,根据2个接触器切换设计的反馈接线在主拖动电机正转时接入速度反馈电压;接触器2在主拖动电机反转时接入速度反馈电压。
反馈是通过改变晶闸管导通角的大小,调节输出电压。将给定电压与反馈电压比较,差值决定导通角大小,差值大,导通角大;差值小,导通角小。
为了电动机快速停转,必须给电动机并联一个大功率的电阻,当电机停转瞬间,电阻接入电机回路,电机线圈释放反电势,电阻加以消耗,从而起到能耗制动的作用。电动机能耗制动和阻容保护电路的接线 结论

